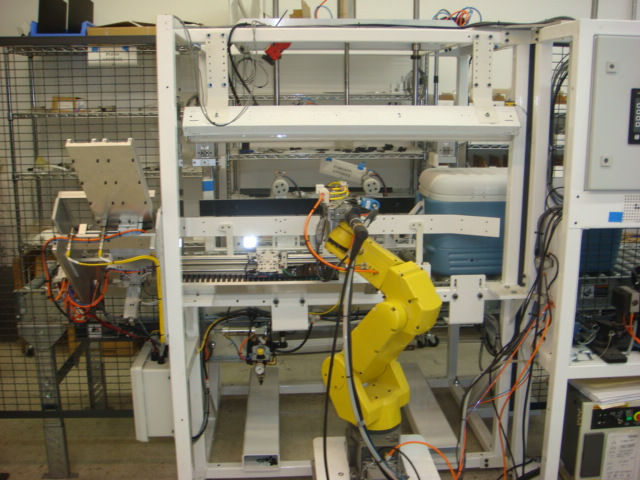
Screw Insertion Work Cell
This machine is designed for any customer that requires a compact SMEMA-type screw insertion cell to install screws into a product. This specification may be modified to meet the customer’s requirement by integrating Design & Assembly Concepts’ DAC Robotic SMEMA Cell with an automated screwdriver and the customer’s other specifications. It would consist of the following systems.
- DAC’s Robotic Assembly Cell consists of:
- Conveyor to transport product through the cell.
- Product specific tooling with a lift and locate device to present the product to the screw insertion tooling.
- Programmable 5-axis Fanuc Robotic positioning system to locate automated screw insertion tooling.
- PC control with Customer Control System (CCS) interface, barcode scanner, and SMEMA interface controls.
- Screw insertion tooling with screw feeding and insertion monitoring controls mounted on the Fanuc Robot J5 axis.
- CCD Camera to read bar code and perform basic inspection mounted on robot J5 axis.
Product Information
| Datasheet |